💡 GPIO Usage¶
Purple Pi OH2 DI-DO I2C SPI Python · gpiod
Control a GPIO pin from Python to switch an LED on and off — a practical starting point for any digital output application (relays, buzzers, indicators).
Connect via SSH (VS Code)¶
- Install the Remote - SSH extension in VS Code
- Press
F1→ Remote-SSH: Connect to Host - Enter:
ssh industio@<your_device_ip>
GPIO Map¶
| Pin # | Function | Description / Alternate Functions | Voltage / Type | Device Node / Notes |
|---|---|---|---|---|
| 1 | 3.3V | Power supply output | 3.3V DC | Power output |
| 2 | 5V | Power supply output | 5V DC | Power output |
| 3 | I2C4_SDA | I2C4 data signal | 3.3V logic | /dev/i2c-4 |
| 4 | 5V | Power supply output | 5V DC | Power output |
| 5 | I2C4_SCL | I2C4 clock signal | 3.3V logic | /dev/i2c-4 |
| 6 | GND | Ground | 0V | Reference ground |
| 7 | GPIO76 | GPIO2_B4 - General purpose I/O | 3.3V logic | gpiochip2 offset 12 |
| 8 | UART7_TX | UART7 transmit data | TTL 3.3V | /dev/ttyS7 |
| 9 | GND | Ground | 0V | Reference ground |
| 10 | UART7_RX | UART7 receive data | TTL 3.3V | /dev/ttyS7 |
| 11 | GPIO75 | GPIO2_B3 - General purpose I/O | 3.3V logic | gpiochip2 offset 11 |
| 12 | GPIO77 | GPIO2_B5 - General purpose I/O | 3.3V logic | gpiochip2 offset 13 |
| 13 | GPIO72 | GPIO2_B0 - General purpose I/O | 3.3V logic | gpiochip2 offset 8 |
| 14 | GND | Ground | 0V | Reference ground |
| 15 | GPIO73 | GPIO2_B1 - General purpose I/O | 3.3V logic | gpiochip2 offset 9 |
| 16 | GPIO74 | GPIO2_B2 - General purpose I/O | 3.3V logic | gpiochip2 offset 10 |
| 17 | 3.3V | Power supply output | 3.3V DC | Power output |
| 18 | GPIO136 | GPIO4_B0 - General purpose I/O | 3.3V logic | gpiochip4 offset 8 |
| 19 | SPI0_MOSI | SPI0 master output, slave input | 3.3V logic | /dev/spidev0.0 |
| 20 | GND | Ground | 0V | Reference ground |
| 21 | SPI0_MISO | SPI0 master input, slave output | 3.3V logic | /dev/spidev0.0 |
| 22 | GPIO137 | GPIO4_B1 - General purpose I/O | 3.3V logic | gpiochip4 offset 9 |
| 23 | SPI0_SCLK | SPI0 serial clock | 3.3V logic | /dev/spidev0.0 |
| 24 | SPI0_CS0 | SPI0 chip select 0 | 3.3V logic | /dev/spidev0.0 |
| 25 | GND | Ground | 0V | Reference ground |
| 26 | SPI0_CS1 | SPI0 chip select 1 | 3.3V logic | /dev/spidev0.1 |
| 27 | I2C7_SDA | I2C7 data signal | 3.3V logic | /dev/i2c-7 |
| 28 | I2C7_SCL | I2C7 clock signal | 3.3V logic | /dev/i2c-7 |
| 29 | GPIO56 | GPIO1_D0 - General purpose I/O | 3.3V logic | gpiochip1 offset 24 |
| 30 | GND | Ground | 0V | Reference ground |
| 31 | GPIO57 | GPIO1_D1 - General purpose I/O | 3.3V logic | gpiochip1 offset 25 |
| 32 | GPIO132 | GPIO4_A4 - General purpose I/O | 3.3V logic | gpiochip4 offset 4 |
| 33 | GPIO58 | GPIO1_D2 - General purpose I/O | 3.3V logic | gpiochip1 offset 26 |
| 34 | GND | Ground | 0V | Reference ground |
| 35 | GPIO59 | GPIO1_D3 - General purpose I/O | 3.3V logic | gpiochip1 offset 27 |
| 36 | GPIO134 | GPIO4_A6 - General purpose I/O | 3.3V logic | gpiochip4 offset 6 |
| 37 | POWER_KEY | Power key input (system power control) | 3.3V logic | /dev/input/event0 |
| 38 | GPIO98 | GPIO3_A2 - General purpose I/O | 3.3V logic | gpiochip3 offset 2 |
| 39 | GND | Ground | 0V | Reference ground |
| 40 | GPIO99 | GPIO3_A3 - General purpose I/O | 3.3V logic | gpiochip3 offset 3 |
Project Setup¶
Digital Output¶
Hardware Wiring¶
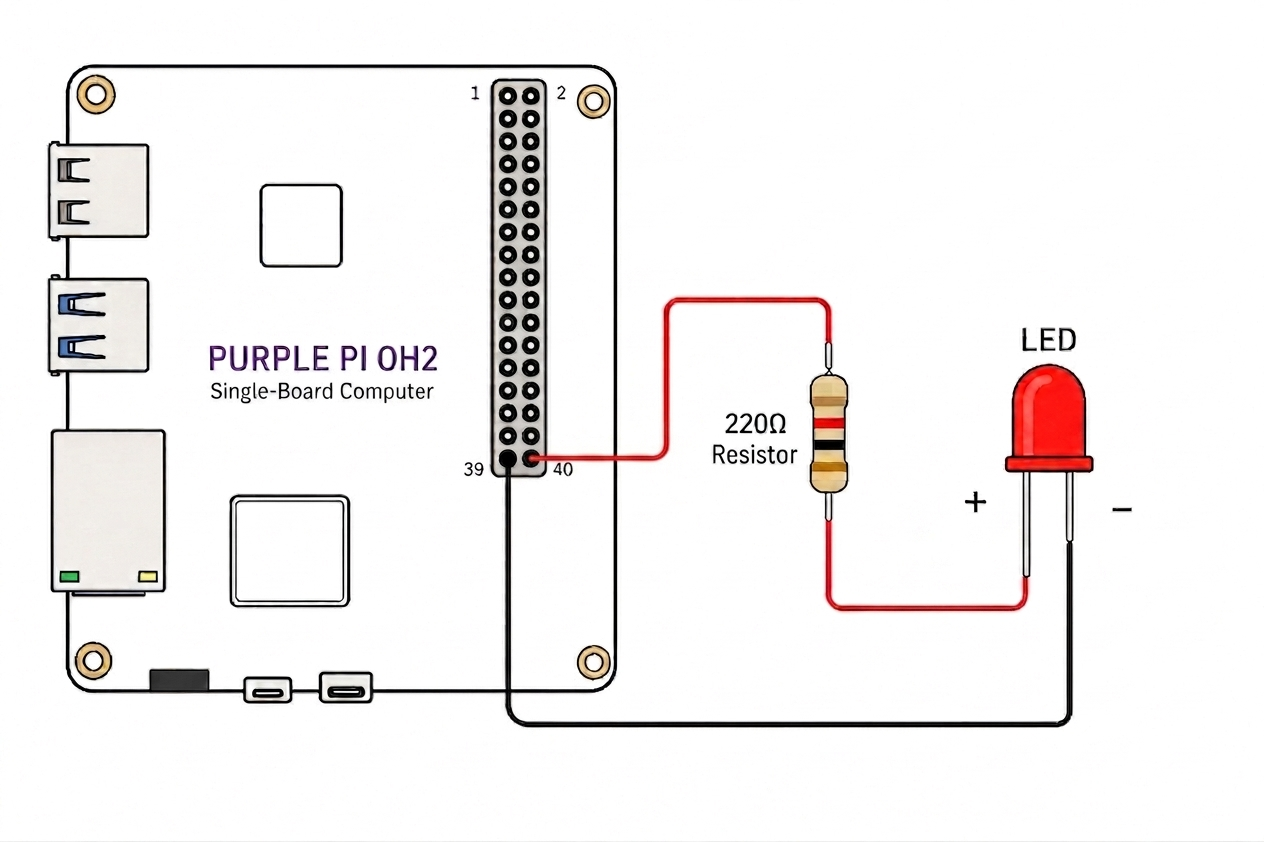
Always use a resistor
A 220Ω resistor protects both the LED and the GPIO pin from overcurrent. Skipping it can permanently damage the pin.
Install gpiod¶
First, install the required gpiod package:
Set GPIO Permissions¶
Grant permissions to access GPIO devices:
LED Control Scripts¶
#!/usr/bin/env python3
"""
Simple LED On/Off for Purple Pi OH2
Using /dev/gpiochip3, line 3
"""
import gpiod
import time
from gpiod.line import Direction, Value
# Your specific GPIO pin
CHIP = '/dev/gpiochip3'
LINE = 3
def led_on():
"""Turn LED on"""
with gpiod.request_lines(
CHIP,
consumer="led_control",
config={
LINE: gpiod.LineSettings(
direction=Direction.OUTPUT,
output_value=Value.ACTIVE,
)
},
) as request:
request.set_value(LINE, Value.ACTIVE)
print("LED is ON")
def led_off():
"""Turn LED off"""
with gpiod.request_lines(
CHIP,
consumer="led_control",
config={
LINE: gpiod.LineSettings(
direction=Direction.OUTPUT,
output_value=Value.INACTIVE,
)
},
) as request:
request.set_value(LINE, Value.INACTIVE)
print("LED is OFF")
def main():
print("Simple LED Controller - GPIO3 Line 3\n")
# Turn LED on
led_on()
# Wait 2 seconds
time.sleep(2)
# Turn LED off
led_off()
if __name__ == "__main__":
main()
#!/usr/bin/env python3
"""
Continuous LED Blinking for Purple Pi OH2
Using /dev/gpiochip3, line 3
Press Ctrl+C to stop
"""
import gpiod
import time
import signal
import sys
from gpiod.line import Direction, Value
# Your specific GPIO pin
CHIP = '/dev/gpiochip3'
LINE = 3
# Global variable to control blinking
blinking = True
def signal_handler(sig, frame):
"""Handle Ctrl+C gracefully"""
global blinking
print("\n\nStopping blinking...")
blinking = False
# Turn LED off before exiting
try:
with gpiod.request_lines(
CHIP,
consumer="led_control",
config={
LINE: gpiod.LineSettings(
direction=Direction.OUTPUT,
output_value=Value.INACTIVE,
)
},
) as request:
request.set_value(LINE, Value.INACTIVE)
print("LED turned off")
except:
pass
sys.exit(0)
def continuous_blink(interval=0.5):
"""Blink LED continuously until Ctrl+C is pressed"""
global blinking
# Register signal handler for Ctrl+C
signal.signal(signal.SIGINT, signal_handler)
print("Continuous Blinking Mode - GPIO3 Line 3")
print("Press Ctrl+C to stop\n")
try:
with gpiod.request_lines(
CHIP,
consumer="led_blink",
config={
LINE: gpiod.LineSettings(
direction=Direction.OUTPUT,
output_value=Value.INACTIVE,
)
},
) as request:
while blinking:
# LED ON
request.set_value(LINE, Value.ACTIVE)
print("LED ON")
time.sleep(interval)
# LED OFF
request.set_value(LINE, Value.INACTIVE)
print("LED OFF")
time.sleep(interval)
except Exception as e:
print(f"Error: {e}")
def main():
# Start continuous blinking with 0.5 second intervals
continuous_blink(interval=0.5)
# Keep the program running
while True:
time.sleep(0.1)
if __name__ == "__main__":
main()
Run the Script¶
Permissions required
GPIO access requires proper permissions. Make sure you've run the permission command above.
Or for continuous blinking:
Stop the blink loop at any time with Ctrl + C.
Manual GPIO Testing (no Python)¶
Useful for quickly verifying your wiring before running a script:
gpioinfo # List all chips and offsets
gpioset gpiochip3 3=1 # Pin 40 HIGH → LED on
gpioset gpiochip3 3=0 # Pin 40 LOW → LED off
gpioget gpiochip3 3 # Read current state
Digital Input¶
Input Monitor Script¶
Use this code for GPIO input state change detection on Purple Pi OH2:
#!/usr/bin/env python3
"""
Simple GPIO Input with State Change Detection for Purple Pi OH2
Using /dev/gpiochip2, line 12
Press Ctrl+C to stop
"""
import gpiod
import time
from gpiod.line import Direction, Value, Bias, Edge
# Your specific GPIO input pin
CHIP = '/dev/gpiochip2'
LINE = 12
def detect_state_changes():
"""Detect and report state changes on GPIO input"""
print(f"Monitoring GPIO input on {CHIP}, line {LINE}")
print("Press Ctrl+C to stop\n")
# Configure the GPIO line as input with pull-down
config = {
LINE: gpiod.LineSettings(
direction=Direction.INPUT,
bias=Bias.PULL_DOWN, # Pull-down: LOW when nothing connected
edge_detection=Edge.BOTH, # Detect both rising and falling edges
)
}
try:
with gpiod.request_lines(
CHIP,
consumer="input_monitor",
config=config,
) as request:
previous_state = None
while True:
# Read current value
current_value = request.get_value(LINE)
# Check for state change
if previous_state is not None and current_value != previous_state:
if current_value == Value.ACTIVE:
print("🔘 HIGH (Button PRESSED or signal HIGH)")
else:
print("🔘 LOW (Button RELEASED or signal LOW)")
previous_state = current_value
# Small delay to prevent CPU overuse
time.sleep(0.01)
except KeyboardInterrupt:
print("\n\nMonitoring stopped")
except Exception as e:
print(f"Error: {e}")
def main():
print("=" * 50)
print("GPIO Input State Change Detector")
print("=" * 50)
detect_state_changes()
if __name__ == "__main__":
main()
Run the Script¶
Make sure GPIO permissions are granted before running the script:
I2C OLED (SSD1306) Complete Guide¶
Disconnect power first
Remove power before connecting the SSD1306 OLED Display to avoid damaging the device.
Overview¶
This guide covers:
- Detecting I2C devices
- Communicating via Python
- Displaying text on OLED
- Rendering images + custom graphics
Wiring (SSD1306 OLED)¶
| OLED Pin | Purple Pi |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SDA | Pin 3 |
| SCL | Pin 5 |
Interpretation¶
| Item | Value |
|---|---|
| I2C Bus | /dev/i2c-4 |
| Device Address | 0x3C |
| Device Type | SSD1306 OLED |
Detect I2C Bus¶
List available I2C buses:¶
Example output:
Scan for I2C Devices¶
Root permission required
Scanning I2C buses requires sudo access.
Output:
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- 3c -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
Device found at:
Install Required Packages¶
Set I2C Permissions¶
Grant permissions to access I2C devices before running scripts:
Basic I2C Test¶
Create the i2c_test.py script:
from periphery import I2C
import time
# Purple Pi OH2 Configuration
I2C_BUS = "/dev/i2c-4" # Confirmed by your i2cdetect output
I2C_ADDR = 0x3C # Confirmed by your scan
def main():
try:
# Open I2C connection
i2c = I2C(I2C_BUS)
print(f"Connected to {I2C_BUS}, device at {hex(I2C_ADDR)}")
# SSD1306 Initialization Sequence
init_sequence = [
0xAE, # Display off
0x00, 0x10, 0x40, 0xB0, 0x81, 0xCF, 0xA1, 0xA6,
0xA8, 0x3F, 0xC8, 0xD3, 0x00, 0xD5, 0x80, 0xD9,
0xF1, 0xDA, 0x12, 0xDB, 0x40, 0x8D, 0x14, 0xAF # Display on
]
# Send initialization commands
for cmd in init_sequence:
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, cmd])])
time.sleep(0.1)
# Clear display function
def clear_display():
for page in range(8):
# Set page address
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0xB0 + page])])
# Set column address
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x00])])
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x10])])
# Write zeros to all columns
for _ in range(128):
i2c.transfer(I2C_ADDR, [I2C.Message([0x40, 0x00])])
clear_display()
# Simple 5x7 font
font = {
'H': [0x7F, 0x08, 0x08, 0x08, 0x7F],
'e': [0x38, 0x54, 0x54, 0x54, 0x18],
'l': [0x00, 0x41, 0x7F, 0x40, 0x00],
'o': [0x38, 0x44, 0x44, 0x44, 0x38],
' ': [0x00, 0x00, 0x00, 0x00, 0x00],
}
text = "Hello"
# Position at page 1
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0xB1])])
# Set column to 0
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x00])])
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, 0x10])])
# Write each character
for char in text:
char_data = font.get(char, [0x00]*5)
for col in char_data:
i2c.transfer(I2C_ADDR, [I2C.Message([0x40, col])])
# Space between characters
i2c.transfer(I2C_ADDR, [I2C.Message([0x40, 0x00])])
print("Text sent successfully!")
i2c.close()
except Exception as e:
print(f"Error: {e}")
print("\nTroubleshooting:")
print("1. Make sure you're using sudo: sudo python3 i2c_test.py")
print("2. Check wiring: SDA=Pin3, SCL=Pin5, VCC=Pin1(3.3V), GND=Pin9")
if __name__ == "__main__":
main()
Run the Test:¶
Expected Output:
Display Image (Bitmap)¶
Generate Bitmap¶
First, create a bitmap from your image. Place your graphics file in the project directory, then create converter.py:
from PIL import Image
# Load image - replace with yours
img = Image.open("elephant.png").convert("L")
# Resize smaller (leave space for text)
img = img.resize((128, 48))
# Convert to black/white
img = img.point(lambda x: 0 if x < 128 else 255, '1')
# Create empty OLED buffer
buffer = [0x00] * (128 * 8)
pixels = img.load()
# Center vertically (top area)
y_offset = 0 # top aligned (can change to center if you want)
for x in range(128):
for y in range(48):
if pixels[x, y] == 0:
oled_y = y + y_offset
page = oled_y // 8
index = x + (page * 128)
buffer[index] |= (1 << (oled_y % 8))
# Save buffer
with open("elephant_bitmap.py", "w") as f:
f.write("elephant_bitmap = [\n")
for i in range(0, len(buffer), 16):
line = ", ".join(f"0x{b:02X}" for b in buffer[i:i+16])
f.write(f" {line},\n")
f.write("]\n")
print("Smaller elephant bitmap generated!")
Run the Converter:¶
Output: elephant_bitmap.py file is created
Create oled_image.py¶
This script displays the image with text. Adjust positioning and text as needed:
from periphery import I2C
from elephant_bitmap import elephant_bitmap
I2C_BUS = "/dev/i2c-4"
I2C_ADDR = 0x3C
i2c = I2C(I2C_BUS)
def send_cmd(cmd):
i2c.transfer(I2C_ADDR, [I2C.Message([0x00, cmd])])
def send_data(data):
i2c.transfer(I2C_ADDR, [I2C.Message([0x40] + data)])
# -------- INIT --------
def init_display():
cmds = [
0xAE, 0x20, 0x00, 0xB0, 0xC8, 0x00, 0x10,
0x40, 0x81, 0xFF, 0xA1, 0xA6, 0xA8, 0x3F,
0xA4, 0xD3, 0x00, 0xD5, 0xF0, 0xD9, 0x22,
0xDA, 0x12, 0xDB, 0x20, 0x8D, 0x14, 0xAF
]
for c in cmds:
send_cmd(c)
# -------- TEXT DRAW --------
def draw_centered_text_on_buffer(buffer, text):
font = {
'E':[0x7F,0x49,0x49,0x49,0x41],
'l':[0x00,0x41,0x7F,0x40,0x00],
'e':[0x38,0x54,0x54,0x54,0x18],
'p':[0x7C,0x14,0x14,0x14,0x08],
'h':[0x7F,0x08,0x08,0x08,0x70],
'a':[0x20,0x54,0x54,0x54,0x78],
'n':[0x7C,0x08,0x04,0x04,0x78],
't':[0x04,0x3F,0x44,0x40,0x20],
'r':[0x7C,0x08,0x04,0x04,0x08],
'o':[0x38,0x44,0x44,0x44,0x38],
'i':[0x00,0x44,0x7D,0x40,0x00],
'c':[0x38,0x44,0x44,0x44,0x20],
's':[0x48,0x54,0x54,0x54,0x20],
}
char_width = 6
text_width = len(text) * char_width
start_x = (128 - text_width) // 2
page = 7 # bottom page
for i, char in enumerate(text):
char_data = font.get(char, [0x00]*5)
for col in range(5):
x = start_x + i * char_width + col
if 0 <= x < 128:
index = x + (page * 128)
buffer[index] = char_data[col]
# spacing column
x = start_x + i * char_width + 5
if 0 <= x < 128:
buffer[x + (page * 128)] = 0x00
# -------- DISPLAY --------
def display_image(buffer):
for page in range(8):
send_cmd(0xB0 + page)
send_cmd(0x00)
send_cmd(0x10)
start = page * 128
send_data(buffer[start:start+128])
# -------- MAIN --------
try:
init_display()
# Copy original buffer (important!)
buffer = elephant_bitmap.copy()
# Add centered text
draw_centered_text_on_buffer(buffer, "Elephantronics")
# Display final image
display_image(buffer)
print("🐘 Elephant + Elephantronics displayed!")
except Exception as e:
print("Error:", e)
finally:
i2c.close()
Run Image Display:¶
UART¶
Connect pins first
Connect GPIO 8 (TX) and GPIO 10 (RX) together for loopback testing.
Overview¶
This guide covers:
- Testing UART with microcom
- Python serial communication
- Loopback test example
Wiring (Loopback Test)¶
| Pin # | Function | Connection |
|---|---|---|
| 8 | UART7_TX | Connect to Pin 10 |
| 10 | UART7_RX | Connect to Pin 8 |
Interpretation¶
| Item | Value |
|---|---|
| UART Port | /dev/ttyS7 |
| Baud Rate | 115200 |
| Device | UART7 |
Install Required Packages¶
Test with microcom¶
Root permission required
UART access requires sudo.
Expected behavior: Type characters - you should see them echoed back immediately.
Press Ctrl + X to exit.
Prepare Python UART Access¶
To run the Python loopback test without sudo, add your user to the dialout group and restart your session:
After running this, log out and log back in. Close all VS Code SSH terminals, then open a fresh SSH session, activate the virtual environment, and run the test code.
Python Loopback Test¶
Activate your Python virtual environment and install pyserial:
Create loopback_test.py:
import serial
import time
# Configuration for Purple Pi OH2 UART7
UART_PORT = "/dev/ttyS7"
BAUD_RATE = 115200
try:
# Initialize serial port
ser = serial.Serial(
port=UART_PORT,
baudrate=BAUD_RATE,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=1
)
print(f"UART opened: {UART_PORT} @ {BAUD_RATE} baud")
print("Starting loopback test. Ensure TX (Pin 8) and RX (Pin 10) are connected.")
print("-" * 50)
counter = 0
while True:
# Construct and send a test message
message = f"Purple Pi OH2 Test #{counter}\n"
ser.write(message.encode())
print(f"Sent: {message.strip()}")
# Wait briefly for the echo
time.sleep(0.1)
# Check for received data
if ser.in_waiting:
response = ser.readline().decode(errors="ignore").strip()
if response:
print(f"Received: {response}")
if response == message.strip():
print("--> Loopback SUCCESS!")
else:
print("--> WARNING: Mismatch in sent/received data.")
else:
print("--> No data received (loopback failed).")
else:
print("--> No data in buffer (loopback failed).")
counter += 1
time.sleep(2) # Wait 2 seconds before next iteration
except KeyboardInterrupt:
print("\nTest stopped by user.")
except serial.SerialException as e:
print(f"Serial error: {e}")
print("Did you remember to connect Pin 8 to Pin 10?")
finally:
if 'ser' in locals() and ser.is_open:
ser.close()
print("UART port closed.")
Run the Script¶
Stop the test at any time with Ctrl + C.
SPI Usage¶
SPI (Serial Peripheral Interface) is a synchronous serial communication protocol used for short-distance, high-speed data exchange between a master (the Purple Pi OH2) and one or more slave devices. It uses four main signal lines: MOSI (master out / slave in), MISO (master in / slave out), SCLK (clock), and CS (chip select).
The Purple Pi OH2 exposes a built-in SPI0 bus on the 40-pin header with two chip-select lines, already available as /dev/spidev0.0 and /dev/spidev0.1:
| SPI Device | Header Pins | Function |
|---|---|---|
/dev/spidev0.0 | Pin 19 (MOSI), Pin 21 (MISO), Pin 23 (SCLK), Pin 24 (CS0) | SPI0 with Chip-Select 0 |
/dev/spidev0.1 | Pin 19 (MOSI), Pin 21 (MISO), Pin 23 (SCLK), Pin 26 (CS1) | SPI0 with Chip-Select 1 |
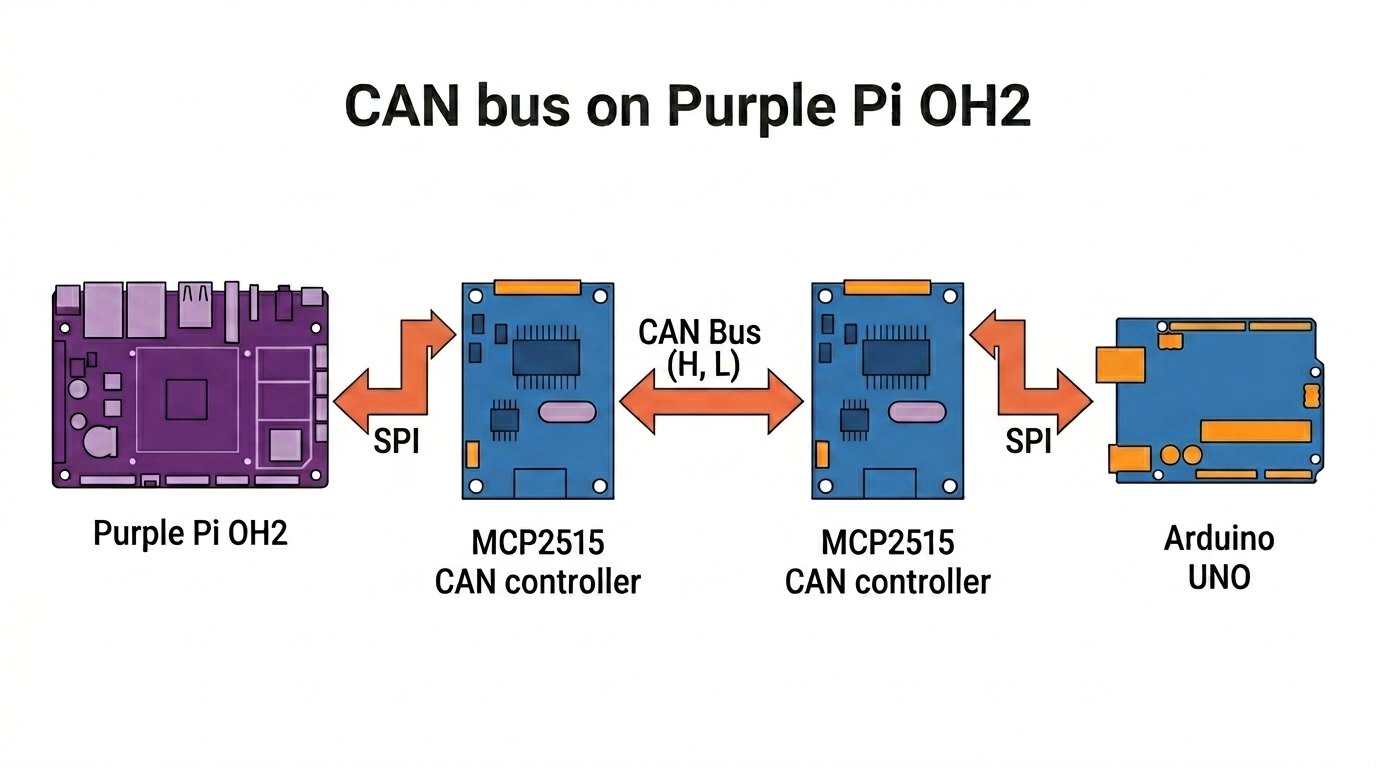
This example uses /dev/spidev0.1 (CS1 on Pin 26) to communicate with an MCP2515 CAN Bus module over SPI.
Power is critical
The MCP2515 logic side works on 3.3 V, but the TJA1050 transceiver needs 5 V to generate the correct differential signals on CAN_H/CAN_L. If you power the module from 3.3 V (Pin 1), SPI communication will work but the CAN bus side will fail.
Overview¶
This guide covers:
- Wiring an MCP2515 CAN module to the Purple Pi OH2 SPI0 bus
- Installing the
spidevPython library - Low-level MCP2515 driver (
mcp2515_driver.py) - Receiving CAN messages with
can_read.py - Loopback self-test, filtering, and CSV logging
Wiring (MCP2515 CAN Module)¶
| Purple Pi OH2 | MCP2515 Module | Function |
|---|---|---|
| Pin 19 | SI | SPI MOSI |
| Pin 21 | SO | SPI MISO |
| Pin 23 | SCK | SPI Clock |
| Pin 26 | CS | SPI Chip-Select 1 |
| Pin 2 | VCC | 5V (required for TJA1050 transceiver) |
| Pin 6 | GND | Ground |
| — | CAN_H | To CAN bus high |
| — | CAN_L | To CAN bus low |
Place a 120 Ω resistor across CAN_H and CAN_L if your module does not have built-in termination.
Interpretation¶
| Item | Value |
|---|---|
| SPI Device | /dev/spidev0.1 |
| SPI Speed | 1 MHz |
| Crystal | 8 MHz or 16 MHz |
| Bitrate | 125 kbps (default) |
| CAN Bus | MCP2515 + TJA1050 |
Environment Setup¶
Create a virtual environment and install the SPI library:
Fix SPI device permissions:
MCP2515 Driver¶
Create mcp2515_driver.py in your project folder:
#!/usr/bin/env python3
"""
MCP2515 CAN Controller Driver - Purple Pi OH2 Version
SPI0 Bus, CS1 (Pin 26) → /dev/spidev0.1
"""
import spidev
import time
# ── SPI Commands ──────────────────────────────────────────────────────────────
MCP2515_RESET = 0xC0
MCP2515_READ = 0x03
MCP2515_WRITE = 0x02
MCP2515_RTS = 0x80
MCP2515_BIT_MODIFY = 0x05
MCP2515_READ_STATUS = 0xA0
MCP2515_RX_STATUS = 0xB0
# ── Registers ─────────────────────────────────────────────────────────────────
CANCTRL = 0x0F
CANSTAT = 0x0E
CNF1 = 0x2A
CNF2 = 0x29
CNF3 = 0x28
CANINTE = 0x2B
CANINTF = 0x2C
EFLG = 0x2D
TXB0CTRL = 0x30
TXB0SIDH = 0x31
TXB0SIDL = 0x32
TXB0EID8 = 0x33
TXB0EID0 = 0x34
TXB0DLC = 0x35
TXB0DATA = 0x36
RXB0CTRL = 0x60
RXB0SIDH = 0x61
RXB0SIDL = 0x62
RXB0EID8 = 0x63
RXB0EID0 = 0x64
RXB0DLC = 0x65
RXB0DATA = 0x66
RXB1CTRL = 0x70
RXB1SIDH = 0x71
RXB1SIDL = 0x72
RXB1EID8 = 0x73
RXB1EID0 = 0x74
RXB1DLC = 0x75
RXB1DATA = 0x76
# ── Operating Modes ───────────────────────────────────────────────────────────
MODE_NORMAL = 0x00
MODE_SLEEP = 0x20
MODE_LOOPBACK = 0x40
MODE_LISTENONLY = 0x60
MODE_CONFIG = 0x80
# ── Bitrate Tables (exact values from Arduino mcp2515.h) ──────────────────────
CAN_SPEED_8MHZ = {
1000000: [0x00, 0x80, 0x80],
500000: [0x00, 0x90, 0x82],
250000: [0x00, 0xB1, 0x85],
200000: [0x00, 0xB4, 0x86],
125000: [0x01, 0xB1, 0x85],
100000: [0x01, 0xB4, 0x86],
80000: [0x01, 0xBF, 0x87],
50000: [0x03, 0xB4, 0x86],
40000: [0x03, 0xBF, 0x87],
33333: [0x47, 0xE2, 0x85],
31250: [0x07, 0xA4, 0x84],
20000: [0x07, 0xBF, 0x87],
10000: [0x0F, 0xBF, 0x87],
5000: [0x1F, 0xBF, 0x87],
}
CAN_SPEED_16MHZ = {
1000000: [0x00, 0xD0, 0x82],
500000: [0x00, 0xF0, 0x86],
250000: [0x41, 0xF1, 0x85],
200000: [0x01, 0xFA, 0x87],
125000: [0x03, 0xF0, 0x86],
100000: [0x03, 0xFA, 0x87],
95000: [0x03, 0xAD, 0x07],
83333: [0x03, 0xBE, 0x07],
80000: [0x03, 0xFF, 0x87],
50000: [0x07, 0xFA, 0x87],
40000: [0x07, 0xFF, 0x87],
33333: [0x4E, 0xF1, 0x85],
20000: [0x0F, 0xFF, 0x87],
10000: [0x1F, 0xFF, 0x87],
5000: [0x3F, 0xFF, 0x87],
}
CAN_SPEED_20MHZ = {
1000000: [0x00, 0xD9, 0x82],
500000: [0x00, 0xFA, 0x87],
250000: [0x41, 0xFB, 0x86],
200000: [0x01, 0xFF, 0x87],
125000: [0x03, 0xFA, 0x87],
100000: [0x04, 0xFA, 0x87],
83333: [0x04, 0xFE, 0x87],
80000: [0x04, 0xFF, 0x87],
50000: [0x09, 0xFA, 0x87],
40000: [0x09, 0xFF, 0x87],
33333: [0x0B, 0xFF, 0x87],
}
class CANMessage:
"""CAN Message container."""
def __init__(self, can_id=0, data=None, dlc=0, extended=False, rtr=False):
self.can_id = can_id
self.data = data if data else []
self.dlc = dlc if dlc else len(self.data)
self.extended = extended
self.rtr = rtr
def __repr__(self):
if self.rtr:
return f"ID: 0x{self.can_id:03X} RTR DLC: {self.dlc}"
data_str = ' '.join(f'0x{b:02X}' for b in self.data[:self.dlc])
ext = " [EXT]" if self.extended else ""
return f"ID: 0x{self.can_id:03X}{ext} DLC: {self.dlc} Data: [{data_str}]"
class MCP2515:
"""
MCP2515 CAN controller driver for Purple Pi OH2.
Default: bus=0, device=None → auto-probe /dev/spidev0.1 then /dev/spidev0.0
"""
def __init__(self, spi_bus=0, spi_device=None, spi_speed=1_000_000, crystal=8_000_000):
if crystal == 16_000_000:
self.speed_table = CAN_SPEED_16MHZ
self.crystal_name = "16 MHz"
elif crystal == 20_000_000:
self.speed_table = CAN_SPEED_20MHZ
self.crystal_name = "20 MHz"
else:
self.speed_table = CAN_SPEED_8MHZ
self.crystal_name = "8 MHz"
if crystal != 8_000_000:
print(f"⚠️ Unknown crystal {crystal/1e6} MHz → using 8 MHz table")
if spi_device is None:
spi_device = self._find_spi_device(spi_bus, spi_speed)
self.spi = spidev.SpiDev()
self.spi.open(spi_bus, spi_device)
self.spi.max_speed_hz = spi_speed
self.spi.mode = 0b00
self.spi.lsbfirst = False
print(f"🔧 MCP2515 /dev/spidev{spi_bus}.{spi_device}"
f" @{spi_speed//1000} kHz crystal={self.crystal_name}")
@staticmethod
def _probe_spi_device(spi_bus, spi_device, spi_speed):
probe = spidev.SpiDev()
try:
probe.open(spi_bus, spi_device)
probe.max_speed_hz = spi_speed
probe.mode = 0b00
probe.lsbfirst = False
probe.xfer2([MCP2515_RESET])
time.sleep(0.01)
status = probe.xfer2([MCP2515_READ, CANSTAT, 0x00])[2]
ctrl = probe.xfer2([MCP2515_READ, CANCTRL, 0x00])[2]
got = status & 0xE0
print(f" 🔍 probe /dev/spidev{spi_bus}.{spi_device}: CANSTAT=0x{status:02X} (mode=0x{got:02X}), CANCTRL=0x{ctrl:02X}")
return got == MODE_CONFIG
except Exception as exc:
print(f" ⚠️ probe /dev/spidev{spi_bus}.{spi_device} failed: {exc}")
return False
finally:
try:
probe.close()
except Exception:
pass
@staticmethod
def _find_spi_device(spi_bus, spi_speed):
for spi_device in (1, 0):
if MCP2515._probe_spi_device(spi_bus, spi_device, spi_speed):
print(f" ✅ Found MCP2515 on /dev/spidev{spi_bus}.{spi_device}")
return spi_device
raise RuntimeError(f"No MCP2515 found on /dev/spidev{spi_bus}.0 or /dev/spidev{spi_bus}.1")
def reset(self):
self.spi.xfer2([MCP2515_RESET])
time.sleep(0.01)
def read_register(self, addr):
return self.spi.xfer2([MCP2515_READ, addr, 0x00])[2]
def read_registers(self, addr, count):
return self.spi.xfer2([MCP2515_READ, addr] + [0x00] * count)[2:]
def write_register(self, addr, value):
self.spi.xfer2([MCP2515_WRITE, addr, value])
def write_registers(self, addr, values):
self.spi.xfer2([MCP2515_WRITE, addr] + list(values))
def modify_register(self, addr, mask, value):
self.spi.xfer2([MCP2515_BIT_MODIFY, addr, mask, value])
def set_mode(self, mode):
_NAMES = {
MODE_NORMAL: "NORMAL",
MODE_SLEEP: "SLEEP",
MODE_LOOPBACK: "LOOPBACK",
MODE_LISTENONLY: "LISTEN-ONLY",
MODE_CONFIG: "CONFIG",
}
self.modify_register(CANCTRL, 0xE0, mode)
time.sleep(0.01)
got = self.read_register(CANSTAT) & 0xE0
if got == mode:
print(f" ✅ Mode → {_NAMES.get(mode, f'0x{mode:02X}')}")
return True
print(f" ❌ Mode change FAILED expected=0x{mode:02X} got=0x{got:02X}")
return False
def set_bitrate(self, bitrate):
if bitrate not in self.speed_table:
closest = min(self.speed_table, key=lambda x: abs(x - bitrate))
print(f"⚠️ {bitrate} bps not in table → using closest {closest} bps")
bitrate = closest
cfg = self.speed_table[bitrate]
if not self.set_mode(MODE_CONFIG):
print("❌ Could not enter CONFIG mode")
return False
self.write_register(CNF1, cfg[0])
self.write_register(CNF2, cfg[1])
self.write_register(CNF3, cfg[2])
c1, c2, c3 = (self.read_register(r) for r in (CNF1, CNF2, CNF3))
if c1 == cfg[0] and c2 == cfg[1] and c3 == cfg[2]:
print(f" ✅ Bitrate {bitrate} bps CNF=[0x{c1:02X}, 0x{c2:02X}, 0x{c3:02X}]")
return True
print(f" ⚠️ CNF verify fail expected=[0x{cfg[0]:02X},0x{cfg[1]:02X},0x{cfg[2]:02X}]"
f" got=[0x{c1:02X},0x{c2:02X},0x{c3:02X}]")
return False
def init(self, bitrate=125_000, mode=MODE_NORMAL, loopback=False):
sep = "─" * 52
print(f"\n{sep}")
print(" MCP2515 init — Purple Pi OH2")
print(sep)
self.reset()
print("✅ Reset")
if not self.set_bitrate(bitrate):
return False
self.write_register(RXB0CTRL, 0x64)
self.write_register(RXB1CTRL, 0x60)
self.write_register(CANINTE, 0x03)
self.write_register(CANINTF, 0x00)
final_mode = MODE_LOOPBACK if loopback else mode
if loopback:
print("🔄 Loopback mode (self-test)")
ok = self.set_mode(final_mode)
print(f"{sep}")
print(f" {'✅ Init complete' if ok else '❌ Init FAILED'}")
print(f"{sep}\n")
return ok
def send_message(self, msg, txbuf=0):
_TX = [
(TXB0CTRL, TXB0SIDH, TXB0DLC, TXB0DATA),
(0x40, 0x41, 0x45, 0x46),
(0x50, 0x51, 0x55, 0x56),
]
txbuf = max(0, min(txbuf, 2))
ctrl, sidh, dlc_reg, data_reg = _TX[txbuf]
if self.read_register(ctrl) & 0x08:
return False
if msg.extended:
self.write_register(sidh, (msg.can_id >> 21) & 0xFF)
self.write_register(sidh + 1, ((msg.can_id >> 13) & 0xE0) | 0x08 |
((msg.can_id >> 16) & 0x03))
self.write_register(sidh + 2, (msg.can_id >> 8) & 0xFF)
self.write_register(sidh + 3, msg.can_id & 0xFF)
else:
self.write_register(sidh, (msg.can_id >> 3) & 0xFF)
self.write_register(sidh + 1, (msg.can_id << 5) & 0xE0)
dlc_val = (msg.dlc & 0x0F) | (0x40 if msg.rtr else 0x00)
self.write_register(dlc_reg, dlc_val)
if not msg.rtr:
for i in range(min(msg.dlc, 8)):
self.write_register(data_reg + i, msg.data[i])
self.spi.xfer2([MCP2515_RTS | (1 << txbuf)])
return True
def available(self):
intf = self.read_register(CANINTF)
if intf & 0x01:
return 1
if intf & 0x02:
return 2
return 0
def read_message(self, rxbuf=None):
if rxbuf is None:
rxbuf = self.available()
if rxbuf == 0:
return None
if rxbuf == 1:
sidh_r, dlc_r, data_r, flag_bit = RXB0SIDH, RXB0DLC, RXB0DATA, 0x01
else:
sidh_r, dlc_r, data_r, flag_bit = RXB1SIDH, RXB1DLC, RXB1DATA, 0x02
sidh = self.read_register(sidh_r)
sidl = self.read_register(sidh_r + 1)
eid8 = self.read_register(sidh_r + 2)
eid0 = self.read_register(sidh_r + 3)
dlc_byte = self.read_register(dlc_r)
extended = bool(sidl & 0x08)
rtr = bool(dlc_byte & 0x40)
dlc = dlc_byte & 0x0F
if extended:
can_id = (((sidh & 0xFF) << 21) |
((sidl & 0xE0) << 13) |
((sidl & 0x03) << 16) |
(eid8 << 8) |
eid0)
else:
can_id = (sidh << 3) | (sidl >> 5)
data = []
if not rtr:
for i in range(min(dlc, 8)):
data.append(self.read_register(data_r + i))
self.modify_register(CANINTF, flag_bit, 0x00)
return CANMessage(can_id, data, dlc, extended, rtr)
def get_error_flags(self):
return self.read_register(EFLG)
def clear_rx_overflow(self):
self.modify_register(EFLG, 0xC0, 0x00)
def get_status(self):
return self.spi.xfer2([MCP2515_READ_STATUS, 0x00])[1]
def close(self):
self.spi.close()
print("🔌 SPI closed")
CAN Read Script¶
Create can_read.py in the same folder:
#!/usr/bin/env python3
"""
CAN Read Script — Purple Pi OH2 + MCP2515
Receives and displays CAN messages from the SPI0 CS1 interface.
"""
import time
import sys
try:
from mcp2515_driver import MCP2515, CANMessage
except ImportError:
print("❌ mcp2515_driver.py not found — save it in the same folder as this script.")
sys.exit(1)
def make_mcp(bitrate=125_000, crystal=8_000_000):
"""Create and initialise an MCP2515 instance for the Purple Pi OH2."""
try:
mcp = MCP2515(
spi_bus=0,
spi_device=None,
spi_speed=1_000_000,
crystal=crystal,
)
except RuntimeError as exc:
print(f"❌ {exc}")
print("❌ No MCP2515 detected on /dev/spidev0.1 or /dev/spidev0.0.")
print(" Check CS wiring, SPI device selection, and that /dev/spidev0.* is enabled.")
sys.exit(1)
ok = mcp.init(bitrate=bitrate)
if not ok:
print("❌ MCP2515 init failed — check wiring and crystal frequency.")
mcp.close()
sys.exit(1)
return mcp
def main(bitrate=125_000, crystal=8_000_000):
print("=" * 52)
print(" CAN Read — Purple Pi OH2 (auto-probing /dev/spidev0.1 and /dev/spidev0.0)")
print("=" * 52)
mcp = make_mcp(bitrate, crystal)
print(f"\nListening at {bitrate} bps … (Ctrl+C to stop)\n")
msg_count = 0
t_prev = time.time()
try:
while True:
buf = mcp.available()
if buf:
msg = mcp.read_message(buf)
if msg:
msg_count += 1
t_now = time.time()
dt_ms = (t_now - t_prev) * 1000
t_prev = t_now
print(f"[{msg_count:5d}] {msg} Δt={dt_ms:7.1f} ms")
if msg.can_id == 0x0F6:
print(" └─ MSG1 from Arduino")
elif msg.can_id == 0x036:
print(" └─ MSG2 from Arduino")
time.sleep(0.001)
except KeyboardInterrupt:
print(f"\n\nStopped. Received {msg_count} message(s).")
finally:
mcp.close()
def monitor_with_filter(bitrate=125_000, crystal=8_000_000):
print("=" * 52)
print(" CAN Monitor — Filter by ID")
print("=" * 52)
mcp = make_mcp(bitrate, crystal)
raw = input("\nFilter CAN ID (hex, e.g. 0x123) [Enter = all]: ").strip()
if raw:
try:
filter_id = int(raw, 16)
print(f"Filtering for 0x{filter_id:03X}")
except ValueError:
print("Invalid input — showing all messages.")
filter_id = None
else:
filter_id = None
print("Showing all messages.")
print("Listening … (Ctrl+C to stop)\n")
msg_count = 0
try:
while True:
buf = mcp.available()
if buf:
msg = mcp.read_message(buf)
if msg and (filter_id is None or msg.can_id == filter_id):
msg_count += 1
ts = time.strftime("%H:%M:%S")
print(f"[{ts}] {msg}")
time.sleep(0.001)
except KeyboardInterrupt:
print(f"\n\nStopped. Received {msg_count} matching message(s).")
finally:
mcp.close()
def log_to_file(bitrate=125_000, crystal=8_000_000):
print("=" * 52)
print(" CAN Logger — Save to CSV")
print("=" * 52)
filename = input("Log filename [can_log.csv]: ").strip() or "can_log.csv"
mcp = make_mcp(bitrate, crystal)
print(f"\nLogging to {filename} … (Ctrl+C to stop)\n")
msg_count = 0
try:
with open(filename, "w") as f:
f.write("timestamp,can_id_hex,dlc,data_hex,extended,rtr\n")
while True:
buf = mcp.available()
if buf:
msg = mcp.read_message(buf)
if msg:
msg_count += 1
ts = time.strftime("%Y-%m-%d %H:%M:%S")
data_hex = " ".join(f"{b:02X}" for b in msg.data[:msg.dlc])
f.write(f"{ts},0x{msg.can_id:03X},{msg.dlc},"
f"{data_hex},{msg.extended},{msg.rtr}\n")
f.flush()
print(f"[{msg_count:5d}] {msg}")
time.sleep(0.001)
except KeyboardInterrupt:
print(f"\n\nStopped. Logged {msg_count} message(s) to {filename}.")
finally:
mcp.close()
def loopback_test(bitrate=125_000, crystal=8_000_000):
print("=" * 52)
print(" MCP2515 Loopback Self-Test")
print("=" * 52)
mcp = MCP2515(spi_bus=0, spi_device=1, crystal=crystal)
try:
if not mcp.init(bitrate=bitrate, loopback=True):
print("❌ Init failed")
return
tx = CANMessage(
can_id=0x7FF,
data=[0xDE, 0xAD, 0xBE, 0xEF, 0x01, 0x02, 0x03, 0x04],
dlc=8,
)
print(f"\n📤 TX: {tx}")
if not mcp.send_message(tx):
print("❌ TX buffer busy")
return
time.sleep(0.05)
buf = mcp.available()
if buf:
rx = mcp.read_message(buf)
print(f"📥 RX: {rx}")
match = (rx.can_id == tx.can_id and
rx.data[:rx.dlc] == tx.data[:tx.dlc])
print("\n✅ PASSED" if match else "\n⚠️ Data mismatch")
else:
print("\n❌ No message received — check chip power/wiring.")
except Exception as exc:
import traceback
print(f"❌ {exc}")
traceback.print_exc()
finally:
mcp.close()
if __name__ == "__main__":
CRYSTAL = 8_000_000
BITRATE = 125_000
cmd = sys.argv[1].lower() if len(sys.argv) > 1 else "listen"
if cmd == "filter":
monitor_with_filter(BITRATE, CRYSTAL)
elif cmd == "log":
log_to_file(BITRATE, CRYSTAL)
elif cmd == "loopback":
loopback_test(BITRATE, CRYSTAL)
else:
main(BITRATE, CRYSTAL)
Usage¶
Loopback Self-Test¶
Verify wiring and chip communication without a CAN bus:
Expected output:
====================================================
MCP2515 Loopback Self-Test
====================================================
...
✅ PASSED
Listen for CAN Messages¶
The script auto-probes /dev/spidev0.1 (CS1 / Pin 26) then falls back to /dev/spidev0.0.
Filter by CAN ID¶
Prompts for a hex CAN ID and only displays matching frames.
Log to CSV¶
Writes timestamp,can_id_hex,dlc,data_hex,extended,rtr to a CSV file.
Configuration¶
If your module uses a different crystal, edit the constants at the bottom of can_read.py:
| Crystal | Typical marking |
|---|---|
| 8 MHz | 8.000 |
| 16 MHz | 16.000 |
| 20 MHz | 20.000 |
Arduino Sender Example¶
Use this sketch on an Arduino with an MCP2515 module to generate test traffic for the Purple Pi OH2 receiver:
#include <SPI.h>
#include <mcp2515.h>
struct can_frame canMsg1;
struct can_frame canMsg2;
MCP2515 mcp2515(10);
void setup() {
canMsg1.can_id = 0x0F6;
canMsg1.can_dlc = 8;
canMsg1.data[0] = 0x8E;
canMsg1.data[1] = 0x87;
canMsg1.data[2] = 0x32;
canMsg1.data[3] = 0xFA;
canMsg1.data[4] = 0x26;
canMsg1.data[5] = 0x8E;
canMsg1.data[6] = 0xBE;
canMsg1.data[7] = 0x86;
canMsg2.can_id = 0x036;
canMsg2.can_dlc = 8;
canMsg2.data[0] = 0x0E;
canMsg2.data[1] = 0x00;
canMsg2.data[2] = 0x00;
canMsg2.data[3] = 0x08;
canMsg2.data[4] = 0x01;
canMsg2.data[5] = 0x00;
canMsg2.data[6] = 0x00;
canMsg2.data[7] = 0xA0;
while (!Serial);
Serial.begin(115200);
mcp2515.reset();
mcp2515.setBitrate(CAN_125KBPS, MCP_8MHZ);
mcp2515.setNormalMode();
Serial.println("Example: Write to CAN");
}
void loop() {
mcp2515.sendMessage(&canMsg1);
mcp2515.sendMessage(&canMsg2);
Serial.println("Messages sent");
delay(100);
}
Library: autowp/arduino-mcp2515
Make sure the Arduino sketch uses the same bitrate (
CAN_125KBPS) and crystal (MCP_8MHZ) settings as the Purple Pi OH2 receiver.
Troubleshooting¶
| Symptom | Cause | Fix |
|---|---|---|
No MCP2515 found on /dev/spidev0.* | CS wired to wrong pin | Use Pin 26 for /dev/spidev0.1 |
| Init succeeds but 0 messages | VCC = 3.3 V | Move VCC to Pin 2 (5 V) — TJA1050 needs 5 V |
| Init succeeds but 0 messages | Crystal mismatch | Check silver can; set CRYSTAL accordingly |
| Init succeeds but 0 messages | Bitrate mismatch | Match BITRATE to other nodes |
| Init succeeds but 0 messages | Missing termination | Add 120 Ω across CAN_H and CAN_L |